Le laboratoire de contrôle de GE Energy à Niskayuna abritait autrefois équipement laser. Ils ont gardé le signe (sans doute pour effrayer les visiteurs).
Le laboratoire de contrôle de GE Energy à Niskayuna abritait autrefois équipement laser. Ils ont gardé le signe (sans doute pour effrayer les visiteurs).
L’imagerie lidar existe depuis presque aussi longtemps que le la technologie sur laquelle elle est basée, le laser. Mais contrairement à son plus célèbre cousin, radar, il était principalement utilisé à des fins de recherche. La raison les scientifiques en savent beaucoup sur la densité des aérosols dans la partie supérieure l’atmosphère est en grande partie due à la pratique du tir puissant lasers dans l’atmosphère et examiner le signal de retour. Cette résume la principale différence entre lidar et radar: lidar fonctionne avec une longueur d’onde plus courte pour pouvoir, en principe, détecter et (parfois) imaginez des objets plus petits, comme des particules d’aérosol.
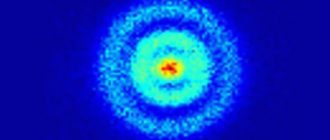
Cette différence fait maintenant l’objet d’une démonstration spectaculaire. avec des chercheurs imagant le profil d’une balle de carabine à air comprimé vol avec une résolution d’environ un micromètre (une carabine à air comprimé la balle fait environ 5 mm de long). Alors que les carabines à air comprimé ont un niveau assez bas vitesse initiale, les chercheurs auraient pu visualiser la balle de une arme à feu avec une vitesse initiale très élevée et avait encore un résolution d’environ 10 micromètres.
Contents
Deux lasers qui ne sont pas tout à fait jumeaux
Les anciens systèmes lidar (et même les plus récents) fonctionnent le principe éprouvé du temps de vol. En gros, vous envoyez une impulsion de lumière et enregistrer le temps qu’il faut pour recevoir un écho. C’est un système assez simple, à condition de ne pas vouloir très bonne précision de distance.
Pour mettre les choses en perspective, un de mes amis a construit un système lidar pour les mesures d’aérosol. Son laser émettait des impulsions qui étaient à peu près cinq nanosecondes (une nanoseconde est un milliardième de seconde) en durée, ce qui lui donne, au mieux, une résolution de distance d’environ un mètre. Considérant qu’il étudiait les aérosols dans la partie supérieure l’atmosphère, une résolution d’un mètre était très bien.
Il n’est pas difficile non plus de faire des impulsions lumineuses considérablement plus court. J’ai déjà travaillé avec un laser qui avait un 35 durée d’impulsion femtoseconde (une femtoseconde est un millionième de milliardième de une seconde, 10-15s), ce qui, si je l’avais utilisé pour lidar, m’a donné une résolution de distance d’environ cinq micromètres. Sauf que ça n’aurait pas été le cas. Le problème est que la lumière électronique les détecteurs ne sont pas assez rapides. Du côté du détecteur, l’impulsion de 35 pieds est enregistré comme une impulsion de 0,5 ns, environ 15 000 fois plus longtemps. Si la le pouls rebondit sur un objet comme une balle, je peux voir le réflexion, mais le changement de forme d’impulsion, qui détient des informations à propos de la forme de la balle, est lavé par la lente électronique.
Nous avons construit de bons systèmes optiques capables de mesurer les changements dans distance dans la plage du picomètre (10-12m) en utilisant interféromètres – si vous prenez des détecteurs d’ondes gravitationnelles comme En standard, nous pouvons faire 10 millions de fois mieux qu’un picomètre. le différence entre ces systèmes et un système lidar à temps de vol est que les interféromètres comparent la lumière réfléchie par le objet à la lumière qui parcourt une distance fixe. Nous mesurons le différence entre les deux distances par le brouillage entre les deux faisceaux lumineux.
Le seul problème potentiel est que si l’objet change de distance exactement d’une longueur d’onde, le signal de la les interférences sont exactement les mêmes. Sur de courtes distances, comme dans un microscope, cela peut être traité. Mais pour de longues distances et gros objets, le problème de déterminer les changements de distance qui sont plus grande que la longueur d’onde de la lumière devient vraiment difficile.
La solution, semble-t-il, consiste à combiner les temps de vol et interférométrie.
Les lasers qui produisent des impulsions lumineuses très courtes sont très spéciaux. En termes de temps, ils produisent une série très régulière de courts, impulsions de lumière vives. Mais si vous regardez la lumière que le laser émet, ce n’est pas une couleur unique. En effet, si vous vouliez sacrifier un oeil en regardant la sortie d’un tel laser, votre oeil (brièvement, avant de devenir aveugle) le percevraient comme le blanc lumière d’une lampe de bureau.
Les apparences seraient trompeuses. Alors que le laser émet beaucoup, beaucoup couleurs, il ne produit pas un spectre lisse. Au lieu de cela, chaque couleur est une couleur pure bien définie, et chacune est séparée de sa voisin par une fréquence fixe. C’est cette propriété, une impulsion lumineuse qui est composé d’un grand nombre de personnes distinctes et précisément couleurs séparées – qui fournit la clé pour une gamme précise.
Lumière, caméra, action
Effectuer des mesures avec cette précision a nécessité une tout nouveau système laser. Et les chercheurs utilisent en fait deux copies du même système laser. Je ne vais pas entrer dans les détails ici, autre que dire que la technique qu’ils utilisent génère des impulsions à la fois très courte et ont une fréquence de répétition des impulsions très élevée – environ 100 GHz, bien que les deux lasers aient une répétition légèrement différente fréquences. Ils ont également un espacement légèrement différent entre les couleurs.
La procédure de mesure est un peu compliquée, mais voici une aperçu de celui-ci. Nous avons deux lasers que je vais appeler la gamme laser et le laser de référence. Si ces deux faisceaux lumineux sont éclairés ensemble sur un photodétecteur, le résultat dépend du fait que le les impulsions se chevauchent dans le temps. Lorsque les impulsions des deux lasers ne sont pas chevauchement, la photodiode émet deux fréquences hyperfréquences signaux – l’un correspondant à l’écart entre les couleurs dans la gamme laser et l’autre de la fente dans le laser de référence. Quand le Les impulsions des deux lasers se chevauchent, deux radios supplémentaires apparaissent des fréquences: ces deux nouvelles fréquences correspondent à la séparation entre les couleurs des deux lasers différents.
Les lasers ont des fréquences de répétition des impulsions légèrement différentes, donc au fil du temps, la sortie de la photodiode oscille de produire deux signaux à produire quatre et à nouveau. La phase de cette oscillation nous parle du chevauchement entre les deux impulsions.
Et c’est exactement ce que les chercheurs utilisent pour déterminer distance à un objet. Le télémètre laser est réfléchi par un objet, et le signal de retour est mélangé avec le laser de référence. En fonction du chevauchement entre les deux impulsions, la distance à un l’objet peut être déterminé avec une précision comprise entre 250 nm et 12 nm (en fonction de la durée moyenne des chercheurs). En fait, il dépend de la phase de cette oscillation de chevauchement par rapport à une signal de référence qui est généré par la lumière qui ne quitte jamais le système.
À quelle vitesse pouvez-vous mettre à jour la position de l’objet? Ça dépend sur la vitesse de l’oscillation de chevauchement, qui est d’environ 100 MHz, ce qui signifie une mise à jour toutes les 10ns. La moyenne augmente la précision tout en sacrifiant la vitesse d’imagerie. À la plus haute précision, le la position est mise à jour toutes les 13 microsecondes.
Le système lidar combine le meilleur d’un lidar à temps de vol avec le meilleur des capteurs interférométriques. Malheureusement, cela aussi combine leurs inconvénients. Dans la configuration actuelle, les impulsions de les télémètres laser sont séparés d’environ 1,5 mm. Si la distance � un objet est un multiple de cela, le signal a exactement la même apparence même. Il existe des moyens de résoudre ce problème, mais ces améliorations auront attendre une prochaine itération.
Vous aurez besoin de plus d’une carte en or pour cela
Cette technique nécessite des équipements impressionnants. Les lasers eux-mêmes sont assez banals et sont basés sur des composants largement utilisé dans les systèmes de communication par fibre optique. Les impulsions très courtes sont générés en guidant la lumière dans un petit anneau appelé microre résonateur, dans une puce de verre. Bien que ces microres particuliers résonateurs ne sont pas disponibles dans le commerce, ils sont fabriqués en utilisant techniques de fabrication standard – une tranche d’elles coûte cher, mais il a beaucoup de bagues.
C’est le détecteur de lumière – et la façon dont les chercheurs détectent et traiter les fréquences radio du détecteur de lumière – cela me prend couper le souffle. À utiliser pour l’un des plus courants lidar applications, nous parlerions de doubler le coût de votre véhicule autonome de rêve.
Les chercheurs donnent un aperçu de la façon dont un artiste peut utiliser système pourrait regarder. Dans leur image, tout le système est alimenté par quelques lasers à diodes – des versions légèrement plus chères du lasers utilisés dans les lecteurs de CD. Ceux-ci sont couplés directement à la dispositifs qui créent des impulsions très courtes – la petite puce de verre qui contient des résonateurs microraux – et à partir de là, la lumière passe sur le système de télémétrie.
Les chercheurs suggèrent que tous les détecteurs coûteux et l’équipement de traitement du signal peut être remplacé par un champ FPGA (programmable gate array) et un convertisseur analogique-numérique. En principe, c’est correct. Mais le détecteur est la raison pour laquelle leur champ d’échantillonnage numérique (rien de plus que quelques FPGA, un convertisseur analogique-numérique et une étiquette de prix plaquée or) coûteux. Honnêtement, je ne pense pas que cela va être raisonnable système lidar à un prix imminent.
L’autre partie que les chercheurs mentionnent en passant est que ce système ne peut actuellement pas être alimenté par des diodes laser. En réalité, dans le système de recherche, ils utilisent un laser assez puissant pour conduit le. Les chercheurs pensent que ce problème peut être résolu en améliorer la fabrication des bagues en verre. Je connais des entreprises qui ont travaillé sur ce problème pendant un certain temps, et des améliorations sont lents et entraînent beaucoup d’idées échouées.
En bref, ce travail est beau, mais il se peut qu’il soit un peu avant vous pouvez être conduit en utilisant le terrain.
Science, 2018, DOI: 10.1126 / science.aao3924